We hebben een computergestuurde schroefasrem gemaakt uit goedkope onderdelen. Lees in dit artikel meer over het waarom en hoe. Voor de nabouwers hebben we verderop in dit artikel ook het elektrisch schema plus computerprogramma toegevoegd.
Waarom?
De ondertitel van dit artikel luidt: "Waarom en hoe?". Voor het "waarom" zijn enkele redenen weer te geven: een paar voor de hand liggende maar ook een wat minder voor de hand liggende reden.
Slijtage en geluid
Bij een zeilschip dat de wereld rondzeilt zal de schroefas meer rondjes draaien onder zeil dan onder de motor. De lagers in de schroefas en keerkoppeling zullen versleten raken door het zeilen, niet door het motoren. Het ronddraaien van het gangwerk produceert trillingen en geluid. Bij sommige keerkoppelingen werkt de smering van het loopwerk alleen maar wanneer de motor draait; een vrijdraaiende schroef kan de keerkoppeling dan ook beschadigen. Veel fabrikanten van keerkoppelingen adviseren dan ook om de schroef niet te laten freewheelen maar tijdens het zeilen de keerkoppeling in de achteruit te zetten.
Variabele schroeven
Klapschroeven, Autoprops, Maxiprops, etc. verminderen de weerstand onder het zeilen door in te klappen of de bladen in vaanstand te brengen. Maar dit werkt alleen als de schroef stopt met draaien. Bij dit soort schroeven is het antwoord dus sowieso duidelijk: de schroef moet worden vastgezet!
Weerstand
Over de vraag wat meer weerstand oplevert, een vastgezette schroef of een vrijlopende schroef, wordt met regelmaat gediscussieerd. Onnodig, want deze vraag kan overtuigend worden beantwoord: Een vrijdraaiende schroef geeft in de praktijk meer weerstand dan een vastgezette schroef. De enige redenen waarom deze vraag steeds weer opnieuw wordt gesteld is dat het antwoord niet bepaald intu�tief is. Je zou gevoelsmatig verwachten dat een vrijdraaiende schroef minder weerstand oplevert, elke tegengestelde bewering is bij voorbaat verdacht en bovendien is de uitleg moeilijk te begrijpen zonder voldoende kennis over aerodynamica en fluid dynamics. Als piloot en vliegtuigbouwer weet ik gelukkig het een en ander over de werking van propellers en vleugelprofielen, evenals over de te volgen procedures bij het uitvallen van een motor bij een vliegtuig of helikopter.
- Om met het laatste te beginnen: Als bij een helikopter de motor uitvalt dan kun je nog gewoon veilig landen, mits je de wieken vrij laat ronddraaien. De wieken blijven ook zonder motor draaien omdat de luchtstroom bij het omlaag zakken de wieken aandrijft. Zou je de wieken vastzetten dan stort de helikopter als een baksteen naar beneden. Wat hier gebeurt is dat draaiende wieken weerstand produceren, weerstand die de helikopter in zijn neerwaartse gang afremt. Draai nu het plaatje 90 graden, de gang is niet meer naar beneden maar naar voren en de schroef zit niet meer boven maar achteraan. Onze helikopter is nu een boot geworden, een boot die sterker wordt afgeremd zolang de schroef blijft draaien. Dat was een goed ding in de helikopter maar minder wenselijk in een boot.
- Als piloot van een vliegtuig leer je tijdens je opleiding dat je bij een motorstoring het beste de propeller kunt stoppen. De vrij ronddraaiende propeller geeft veel weerstand die het vliegtuig afremt, waardoor je om de noodzakelijke snelheid te houden vrij steil naar beneden moet. Als je het vliegtuig even optrekt waardoor de snelheid zo laag wordt dat de propeller stilvalt, dan heb je daarna kans dat de propeller stil blijft staan waardoor je een grotere afstand kunt afleggen om bij een geschikte landingsplaats te komen.
- Bij meermotorige propellervliegtuigen schrijft de fabrikant voor dat bij motoruitval de betreffende propeller absoluut moet worden gestopt omdat een vrij ronddraaiende propeller zoveel weerstand oplevert dat het vliegtuig hierdoor scheef trekt en onbestuurbaar kan worden.
De werking van luchtschroeven en waterschroeven (beide "propellers") is identiek. In beide gevallen geldt dat ze een profiel hebben dat speciale eigenschappen heeft wanneer de stroming er niet tegen maar overheen beweegt. Een vliegtuigvleugel verandert van een plank naar een vorm die "lift" genereert, een propeller (wat eigenlijk een ronddraaiende vleugel is) genereert voortstuwing, of als je de kwestie omdraait, extra weerstand.

In theorie valt het met de weerstand van een echt vrijdraaiende schroef nog wel mee, maar zodra het draaien weerstand oplevert gaat de schroef "werken" en begint energie te onttrekken uit de voortgaande beweging. We noemen dit "induced drag". In de praktijk heeft een echte scheepsschroef altijd weerstand, door het schroefaslager, koppelingen, en de weerstand van de keerkoppeling. Er wordt dus energie gestolen uit de voortgaande beweging van de boot, energie die wordt omgezet in geluid, trillingen, slijtage en warmte. Die weerstand is niet te verwaarlozen maar neemt progressief toe: Uit testen is gebleken dat de draaiweerstand van het gangwerk de induced drag (weerstand) van de schroef met een factor 3 laat toenemen!

Hoewel een draaiende schroef dus veel weerstand oplevert is de vergelijking pas compleet als je weet wat een vaststaande schroef aan weerstand oplevert. En hier is waar een vliegtuig of helikopter verschilt met een scheepsschroef: een stilstaande scheepsschroef bedekt een groter deel van zijn "werkoppervlak" dan bijvoorbeeld de wieken van een helikopter. Dus de theoretische "winst" die je kunt behalen door de schroef vast te zetten wordt minder naarmate de stilstaande schroef een groter deel van het oppervlak overdekt. Een vaste driebladsschroef geeft bij stilzetten bijvoorbeeld minder winst dan een tweebladige klapschroef zou doen. Bij vaste driebladsschroeven is het zelfs zo dat als je de draaiweerstand weglaat de vrijdraaiende schroef minder weerstand oplevert dan de vastgezette schroef. Helaas is dit iets dat vaak wordt "ontdekt" in verkeerd uitgevoerde testen, op internet een eigen leven gaat leiden en het publiek op het verkeerde been brengt. Inderdaad misleidend, want in de praktijk levert het gangwerk achter de schroef zoveel weerstand op dat de geconstateerde winst alsnog omslaat in verlies, iets waarmee in "de test" geen rekening is gehouden omdat daar nooit een keerkoppeling aan de schroef is gehangen. Dus in de praktijk is het stilzetten van de schroef altijd een goed iets, nog even losgezien van factoren als slijtage van het gangwerk.
Maar hoe?
Onze oude keerkoppeling was een mechanische keerkoppeling. De schroefas kon dan ook eenvoudig worden gestopt door de versnelling in vooruit of achteruit te zetten. Maar onze nieuwe keerkoppeling is een hydraulische keerkoppeling... En als de motor niet draait werkt de hydrauliek niet en draait alles vrij rond. Navraag bij de fabrikant van onze Autoprop leerde dat de propeller pas in vaanstand komt wanneer het draaien wordt gestopt. Dus we moesten iets verzinnen om de schroef te stoppen: een schroefasrem dus!

Remschijf
Na op internet rondgespeurd te hebben was de conclusie duidelijk: een schijfrem is de gemakkelijkste en handigste oplossing om de schroefas stil te zetten. Nu bleef de vraag alleen over wat voor remklauw we zouden gaan toepassen. Het mooiste zou het zijn als we een remklauw konden vinden die opent op hydraulische druk, want dan zouden we de remklauw kunnen bedienen met de hydrauliek van de keerkoppeling zelf, of anders desnoods de oliedruk van de motor. Maar alle remklauwen die we vonden remmen juist harder als de oliedruk hoger wordt, en ombouwen van een bestaande remklauw leek niet goed mogelijk. Nu konden we natuurlijk de remklauw van een motorfiets, ATB of zoiets nemen en gewoon een remhandel in de kuip monteren, die we dan met elastiek of zo zouden kunnen vastzetten, maar dat vonden we niet zo fraai. En bovendien is het wachten op het moment waarop je vergeet om de rem eraf te halen... Dan gaat er gegarandeerd iets kapot, waarbij het onduidelijk is wat dat "iets" zal zijn.
Elektrische remklauw
Toevallig hoorde ik dat er tegenwoordig auto's zijn die een elektrisch bediende parkeerrem hebben. Het duurde niet lang voor ik had gevonden welk merk en modellen auto's dat zijn en ik via eBay zo'n remklauw had weten te bemachtigen. De boot was op dat moment nog in reparatie, er werd volop gelast en de aandrijflijn met Python-drive was nog in aanbouw. De toevoeging van een remschijf kon mooi worden ge�ntegreerd met de galvanische isolatie van de schroefas met de motor. (Galvanische isolatie van de schroefas is iets wat in een aluminium jacht een absolute vereiste is, als je tenminste wilt voorkomen dat je hele boot verandert in ��n grote opofferingsanode voor je schroefas en schroef.)
De remklauw kon eenvoudig open en dicht worden gestuurd door het aanleggen van 12 Volt over de aansluitdraden, maar cruciaal was hierbij de timing van het onderbreken van de stroomkring. In de betreffende auto's wordt dit geregeld door een computer die reageert op de stroomtoename wanneer de rem aangrijpt en op basis hiervan de stroom onderbreekt, maar zo'n computer zal niet gemakkelijk aan de praat te krijgen te zijn zonder de bijbehorende auto. De keus was dus eenvoudig: OF gewoon een drukschakelaar monteren en zelf bepalen hoever je de remklauw dicht of open laat gaan (wat neerkomt op "raden" als je geen zicht hebt op de schroefas), OF zelf een stukje elektronica in elkaar knutselen.

Het is uiteindelijk het laatste geworden, niet alleen voor het gemak maar ook om fouten in de bediening te voorkomen, maar vooral ook om de remklauw volledig automatisch te laten openen zodra het contact van de motor wordt aangezet.
Computergestuurd
Na het onderzoeken van de mogelijkheden heb ik gekozen voor besturing door een computer. Dat klinkt als overkill en dat is het eigenlijk ook... maar aangezien je zo'n postzegel-computer (Arduino pro mini) voor 2 Euro kunt kopen en het ding nauwelijks stroom verbruikt vond ik het een aantrekkelijke optie. En als je eenmaal zo'n computer gebruikt dan kun je het ook gelijk goed doen: allerlei zaken instelbaar maken zoals remkracht, openingsbreedte, je kan hem rekening laten houden met het verslijten van de remblokjes door hem zelfstellend te maken, enzovoorts.
Nabouwen
Voor wie het systeem wil nabouwen volgen hieronder wat technische details. Nabouwen voor eigen gebruik is toegestaan, maar voor commerci�le exploitatie is mijn toestemming benodigd. De broncode voor de computer en het elektrische schema zijn auteursrechtelijk beschermd. Toepassing van onderstaand idee, schema en broncode valt uiteraard onder je eigen verantwoordelijkheid: Een rem die weigert los te gaan kan rampzalige gevolgen met zich meebrengen.
Geen zin of voldoende kennis om zelf de elektronica te solderen en/of de Arduino in te programmeren? Neem contact met ons op; We kunnen je tegen een vergoeding van een afgebouwd en werkend exemplaar voorzien.
Bediening
Voor de bediening van de rem met onderstaand schema en computerprogramma bestaan meerdere mogelijkheden die door bepaalde pinnetjes van de Arduino aan min te verbinden kunnen worden gekozen.
Voor de bediening hebben wij zelf gekozen tussen voor een tuimelschakelaar met neutrale middenstand. De bovenste helft indrukken en de rem gaat erop, de onderste helft indrukken en de rem gaat eraf. Zodra het contact van de motor wordt aangezet gaat de rem er vanzelf af en kan er ook niet meer op worden gezet zolang de motor loopt. In de schakelaar zit een LED die aangeeft of de rem vast of los is.

Wanneer de schakelaar in de "los" stand wordt vastgehouden tijdens het aanzetten van de elektronica dan staat de computer in de setup-mode. De rem wordt nu bediend zonder dat de elektronica zich ermee bemoeit; de motor van de rem blijft lopen tot de schakelaar wordt losgelaten. De computer monitort de tijdstuur en stroomsterkte en slaat deze op als leidraad voor de automatische bediening van de rem. Zo kun je zelf instellen met hoeveel kracht de rem moet aangrijpen en hoe ver de remblokken bij het lossen van de schijf moeten afkomen. Het leuke is dat hierna de computer zelf rekening houdt met verslijtende remblokken en dergelijke en altijd met dezelfde kracht de rem blijft bedienen.
In de Arduino hebben we ook een ingang met de naam OVERRIDE geprogrammeerd. Wanneer deze aan min wordt verbonden dan is het mogelijk om naast automatische bediening de rem ook "handmatig" te bedienen door de schakelaar ingedrukt te houden. We hebben hiervoor een tweede schakelaar (staat niet in het schema aangegeven) gemonteerd in de nabijheid van de schijfrem zelf. Deze schakelaar is dubbelpolig en bedient zowel de schakelingangen als de OVERRIDE ingang. Idee van deze schakelaar is dat deze kan worden gebruikt bij werkzaamheden aan de rem en/of aandrijving.
Voor het ledje zijn twee mogelijkheden: Een eenvoudig "led aan is rem erop/led uit is rem eraf" maar ook een modus waarbij de led normaal gesproken uitstaat maar bij kort aanraken van de tuimelschakelaar kortstondig de status van de rem laat zien. Deze modus, die gekozen kan worden door de INDICATION_MODE ingang aan min te verbinden, heeft als voordeel dat je niet tijdens het zeilen voortdurend tegen een brandende led zit aan te kijken.
Tijdens het lopen van de remmotor (dus wanneer de rem erop of eraf aan het gaan is) knippert de LED snel zodat je kan zien dat er iets aan het gebeuren is.
Mechaniek
De schijfrem is gemaakt uit een stuk overgebleven 8mm aluminium plaat waar ook onze kielen van zijn gemaakt. Wellicht zijn ook andere materialen bruikbaar, of is het mogelijk om de schijfrem van een auto of motorfiets te gebruiken. De elektrische remklauw die wij in onze boot gebruiken is afkomstig van een achterrem die wordt toegepast in de duurdere modellen auto's van het VAG-concern. De onze komt uit een Volkswagen Passat, maar ze worden ook toegepast in bepaalde modellen Seat's en Audi's. Het zijn combi-remmen die zowel hydraulisch als elektrisch te bedienen zijn. Het hydraulische deel wordt bij onze toepassing niet gebruikt, dat mag dus defect zijn en maakt het wellicht wat gemakkelijker om goedkoop een exemplaar te bemachtigen.
Elektronica
Voor de aansturing is gebruik gemaakt van een Arduino Pro Mini op 5 Volt. Andere modellen Arduino's zouden ook moeten werken maar aan de extra's zoals USB-poorten of meer geheugen heb je niets. Een Arduino levert niet genoeg stroom om de remklauw rechtstreeks te bedienen, dus je hebt twee relais plus aansturing daarvan nodig. Verder heb je een weerstand nodig om de remstroom te meten, een bedieningsschakelaar en een controle-lampje (LED). Zelf hebben wij twee schakelaars toegepast: eentje in de kuip bij het motorpaneel, en eentje bij de schijfrem in het motorruim. De laatste is een dubbelpolige schakelaar en bedient ook de OVERRIDE-ingang op de Arduino. Door dit laatste wordt onderhoud en testen van de aandrijving plus rem vergemakkelijkt.
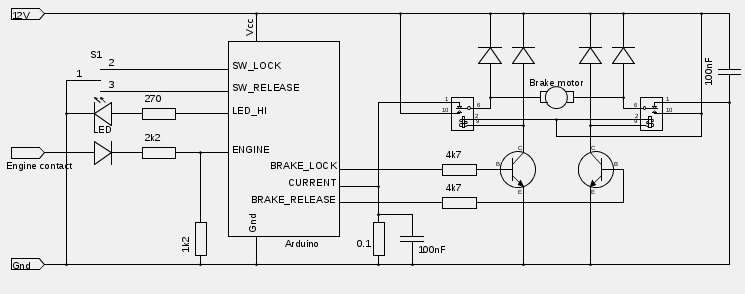
De aansluitpinnen van de Arduino zijn afhankelijk van het type Arduino. In de broncode van de Arduino staan de gebruikte poorten aangegeven. Het is niet belangrijk wat voor diode's er gebruikt worden: zelf heb ik 1N4148's gebruikt. De transistoren doen er ook al niet toe: goedkope BC547's voldoen prima. Voor de relais moeten 12Volt exemplaren met minstens 8 Ampere schakelstroom worden gebruikt.
Software
Om de Arduino te programmeren heb je, afhankelijk van het model Arduino, wel of geen externe programmer nodig. De Arduino Pro Mini die wij gebruiken heeft een externe programmer nodig, maar die is gangbaar, even klein als de Arduino zelf en kost op eBay ook maar 3 dollar of zo. Verder heb je uiteraard de bron-code nodig: Download hier de bron-code.
De bron-code is rijkelijk van commentaar voorzien zodat je gemakkelijk de bron-code aan je eigen wensen kunt aanpassen. Maar doe dit alleen wanneer je hebt vastgesteld dat de originele combinatie elektronica en software werkt.
Tips
Hieronder enkele tips voor bouw en gebruik:
- De stroomsterkte is bepalend hoe "strak" de rem aangrijpt. Deze stroomsterkte kan in de setup-modus worden ingesteld. Stel de rem niet strakker af dan nodig is om de schroefas te laten stoppen! Mocht de rem door een of andere reden defect raken en niet meer los willen dan blijft het tenminste mogelijk om toch de scheepsmotor erdoorheen te laten trekken, of om met een koevoet of iets dergelijks de klauw van de remschijf af te wrikken.
- Haal de rem eraf wanneer de boot in een haven ligt. Als de remklauw mocht vastroesten dan is het beter dat dit in de "open" positie gebeurt!
- Gebruik relais van goede kwaliteit! Een vastzittend relais kan nare gevolgen hebben zoals een doorgebrande remmotor.
- Zorg dat de bekabeling van de rem naar de elektronica gemakkelijk los te maken is. Bij een defect relais heb je dan tenminste de mogelijkheid om de draden kortstondig aan de accu te verbinden en zodoende toch de rem los te krijgen.
